Monitoring crop nutrient levels autonomously can
allow farmers to quickly adjust fertilizer usage in their fields
to maximize their harvest. Previous research has focused
on automating crop inspection through visual tracking of
growth, which can delay the detection of nutrient deficiencies
as visual symptoms may be slower to develop. Instead, we
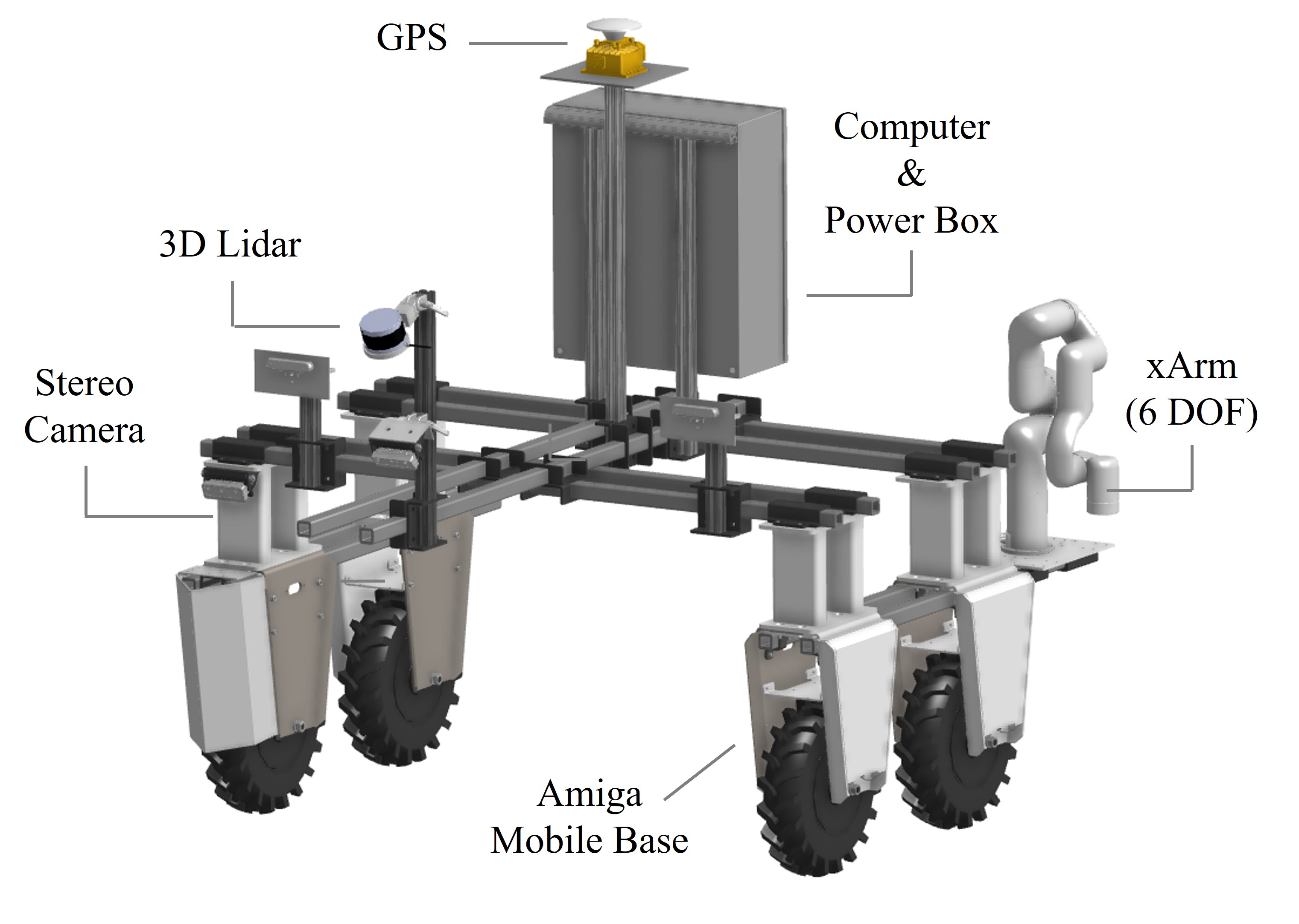
present a contact-based phenotyping robot platform that can
autonomously insert nitrate sensors into corn stalks. This task
is challenging not only because of the varying field conditions
encountered on the farm but also because inserting sensors
requires sub-centimeter precision in an environment that has
high clutter and occlusion. To deal with these challenges, we
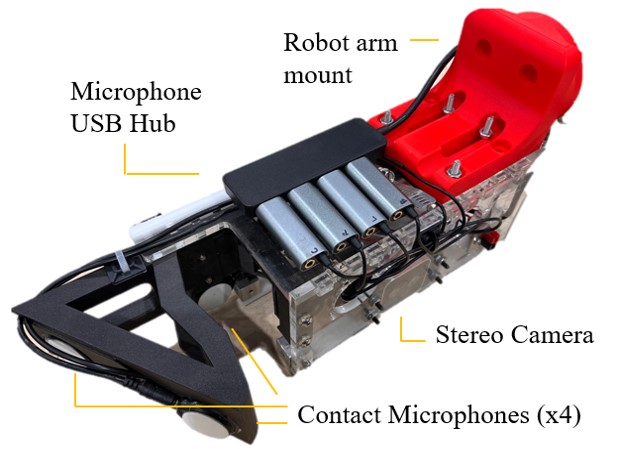
create a custom robot gripper with compliant mechanisms for
interacting with the cornstalks and develop a robust perceptionaction
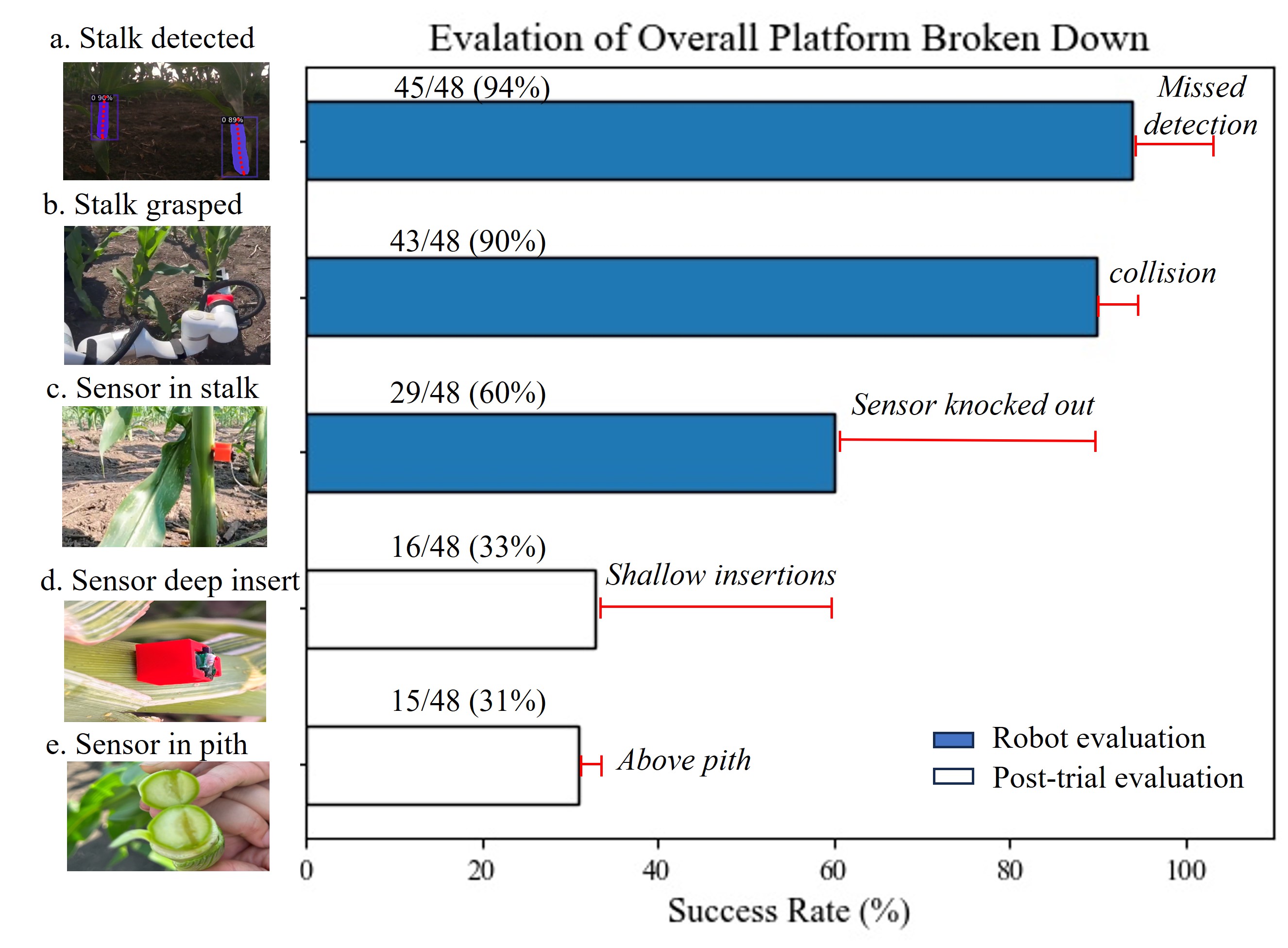
pipeline to deploy sensors. Through our experimental
validation at a cornfield in Iowa, we demonstrate our robot
platform’s capability of autonomously inserting sensors into 48
cornstalks over a two-day trial period. Our research platform
is all open-sourced with a detailed appendix.