Best Stalk Determination
We've now produced a number of 3D grasping points for each frame, so we need to decide which stalk is best
to grasp:
Based on the manipulator dimensions and shape, stalks which are not graspable—those where another stalk is
blocking the predicted path the manipulator would take to insert the sensor, or where the manipulator
would not be able to reach—are eliminated. Stalks with unrealistic positions, caused by sporadic
segmentation output, misalignment between the depth map and image, or mis-measurements in the depth map,
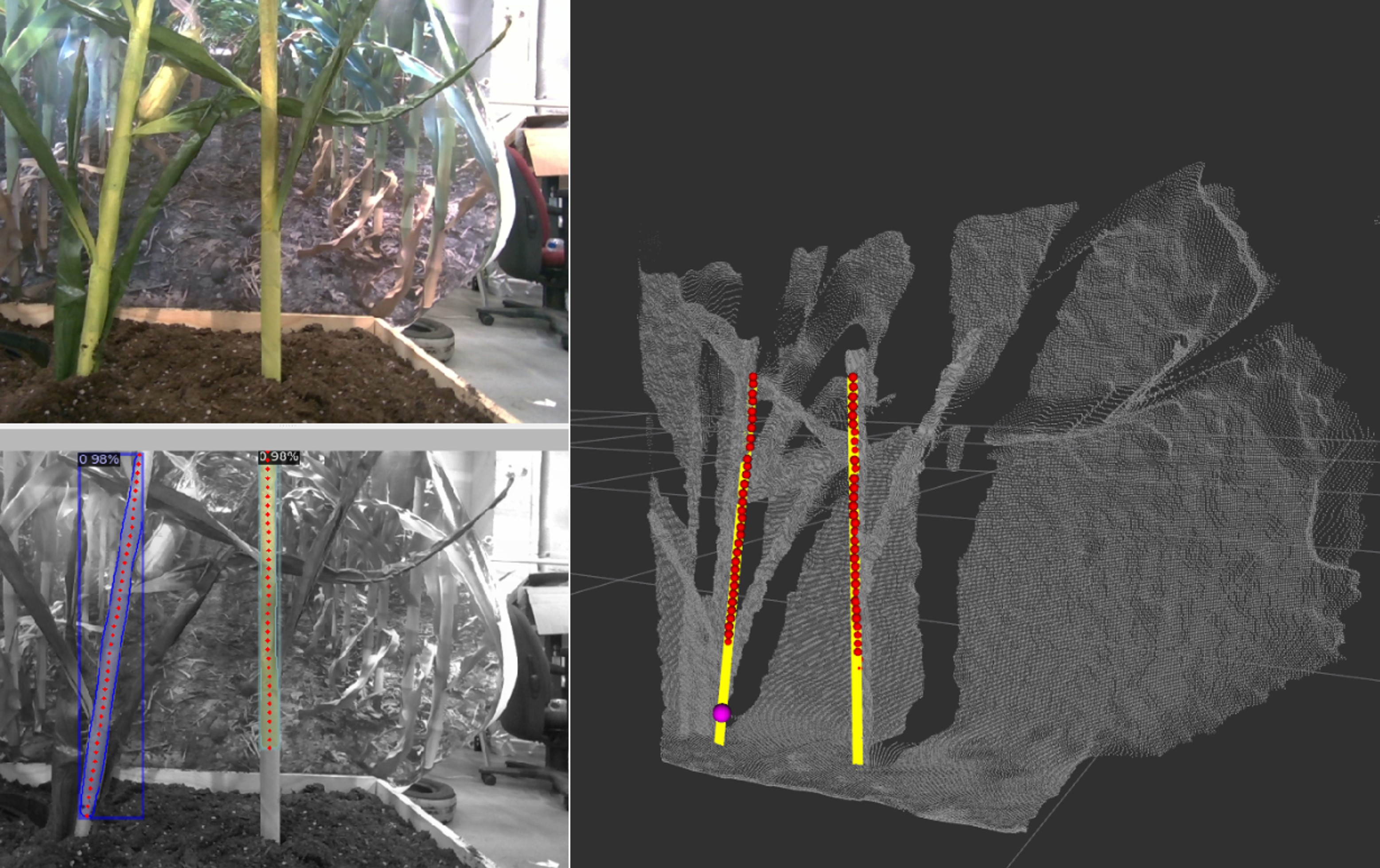
are eliminated as well. The best stalk is then determined from among those remaining based on a heuristic
weighting function using the stalk's height and width, the confidence of the segmentation model's
prediction, and the distance of the stalk from the optimal grasping position for the arm. This weighting
function favors stalks which are more easily graspable and which have a higher chance for successful
insertion; the precise weighting of these factors could be adjusted for a different task based on the most
favorable conditions for the manipulator.
Consensus Among Frames
This process is repeated for a number of frames, after which the best stalks from all frames are
clustered and the largest cluster is taken to be the consensus stalk. A representative stalk from this
cluster is then chosen, and the grasping point for this stalk is determined to be the final grasping
point.
If no valid stalks are detected among any frame—which may occur if there are no stalks in view, or if
the stalks are too difficult to process—a reposition response is given, indicating to the robot
that the current viewpoint is insufficient to estimate a reasonable insertion pose.
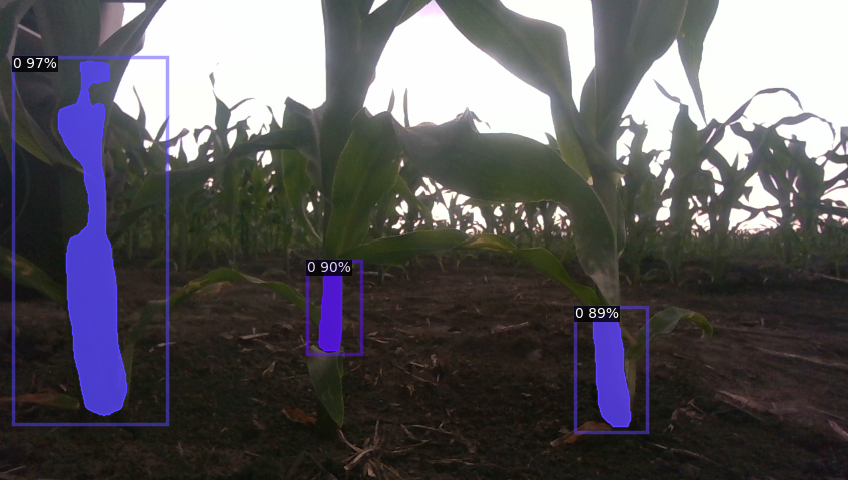
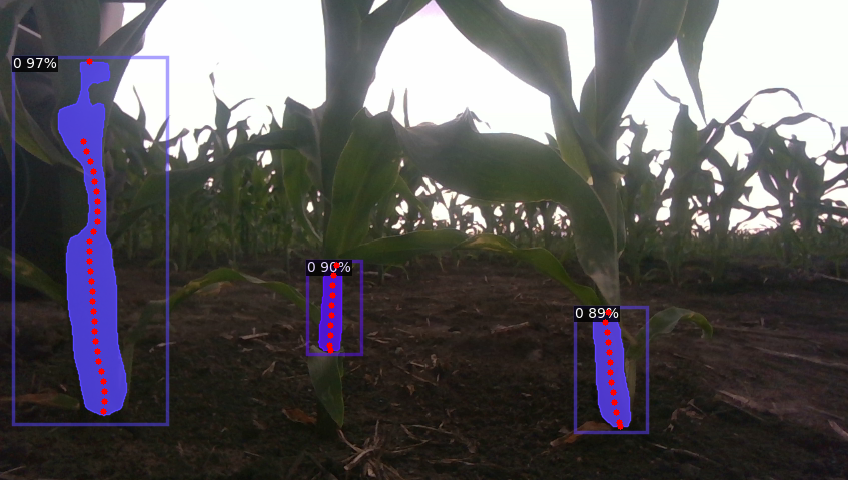
Qualitative Evaluation with Mock Setup
With synthetic and real corn grown with the indoor greenhouse, we tested the detection pipeline.