Methodology Overview
The methodology pairs geometry, semantics, and geospatial alignment into a single end-to-end workflow for actionable Tree-of-Heaven localization.
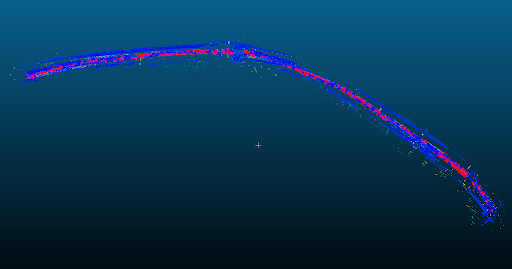
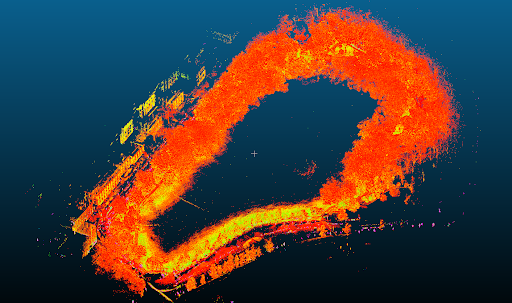
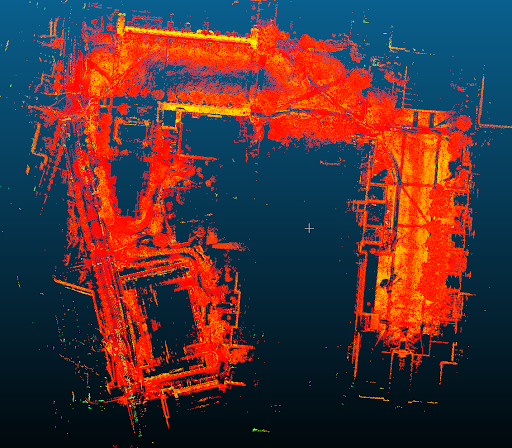
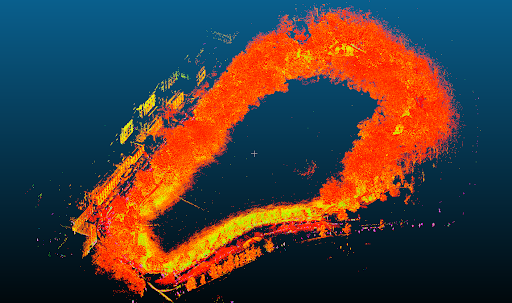
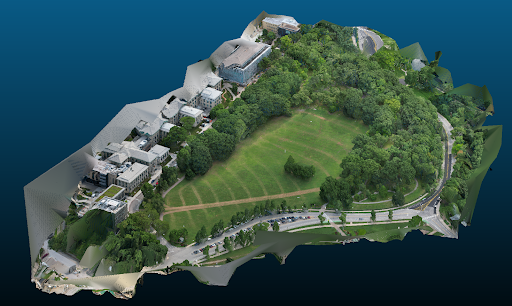
1. Mapping
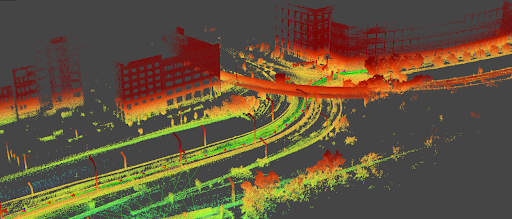
Build a consistent 3D map with GLIM SLAM / photogrammetry from LiDAR trajectories. This map provides the structural reference frame for all semantic labels.
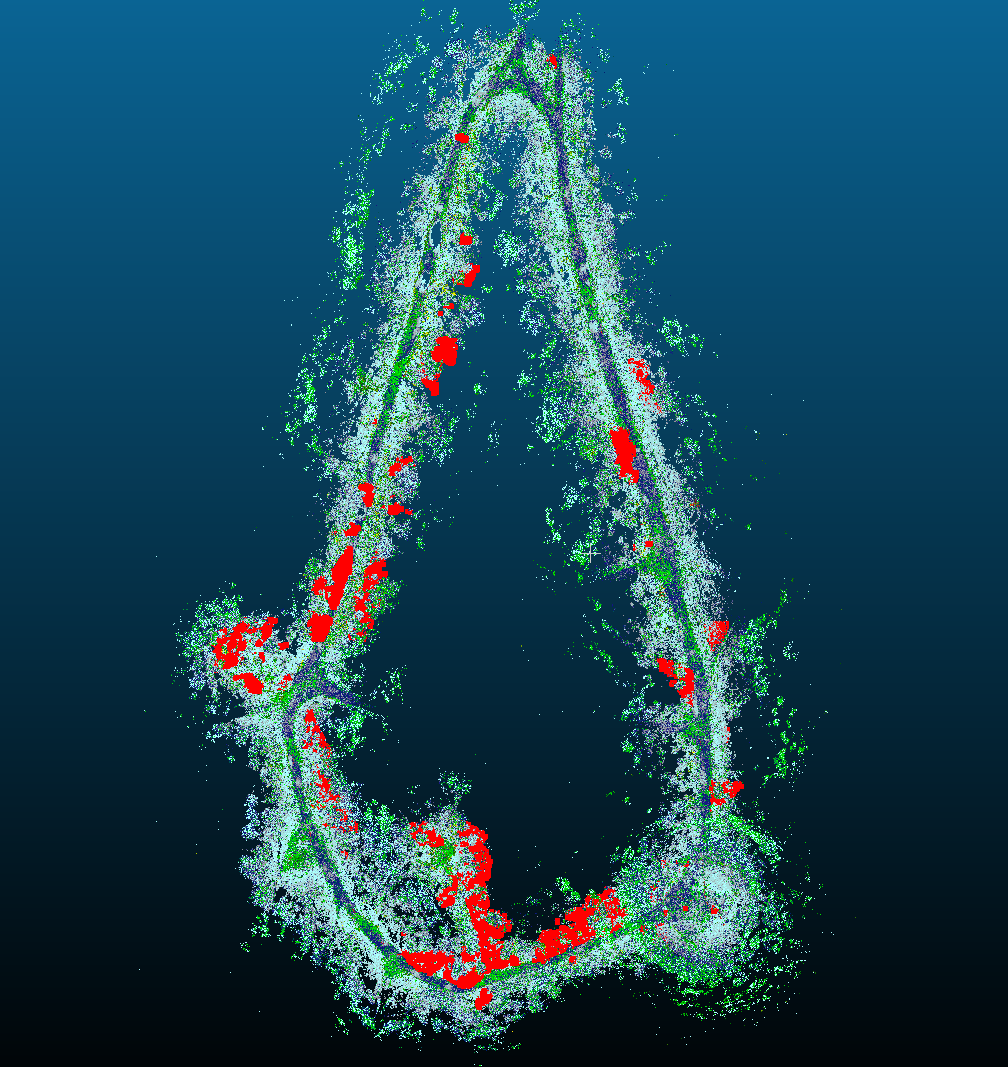
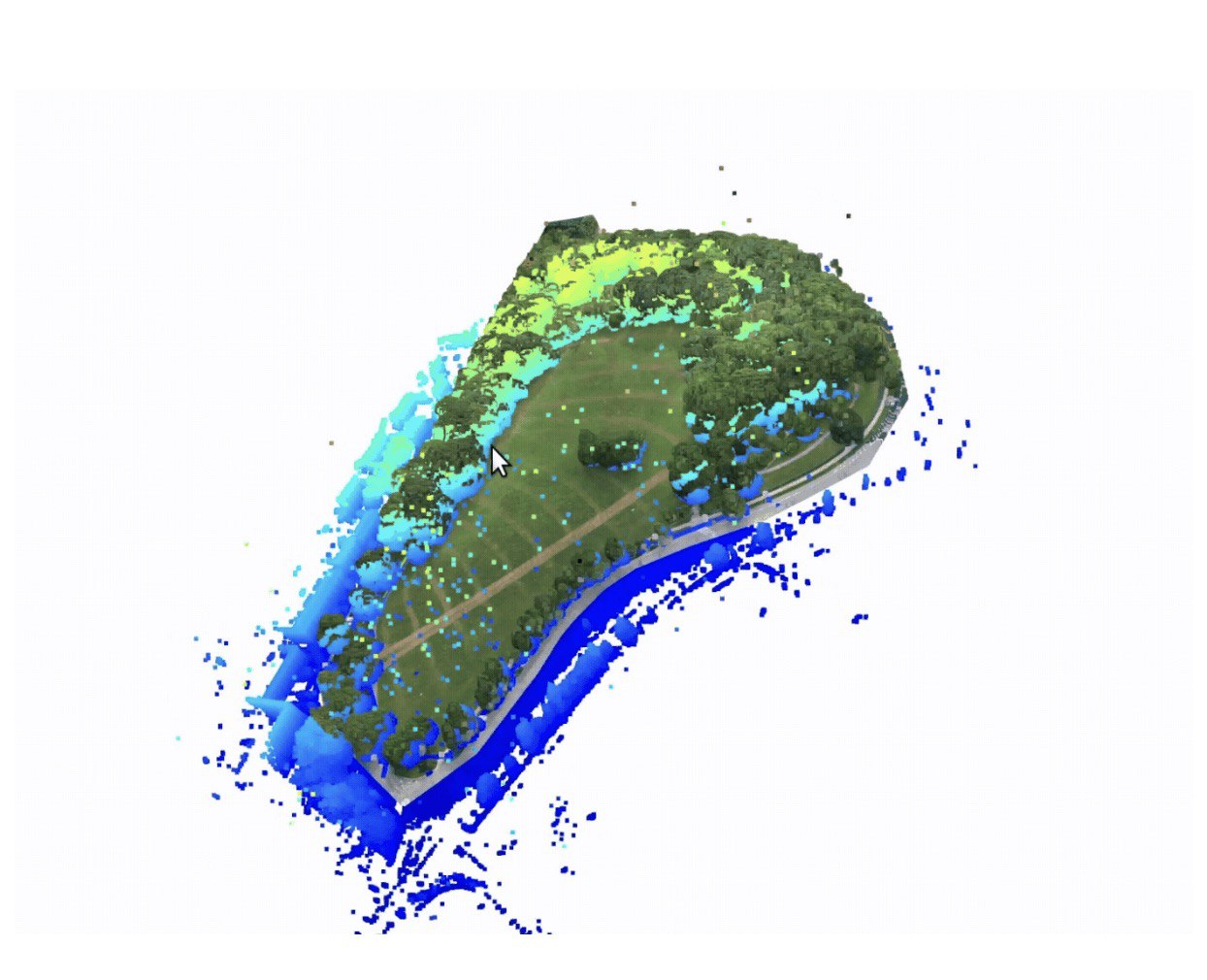
2. Segmentation
Segment Tree-of-Heaven candidates in RGB frames. Per-frame masks provide dense visual evidence that can be fused across viewpoints instead of relying on single detections.

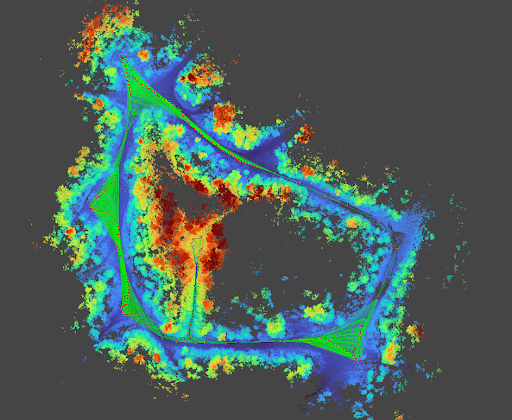
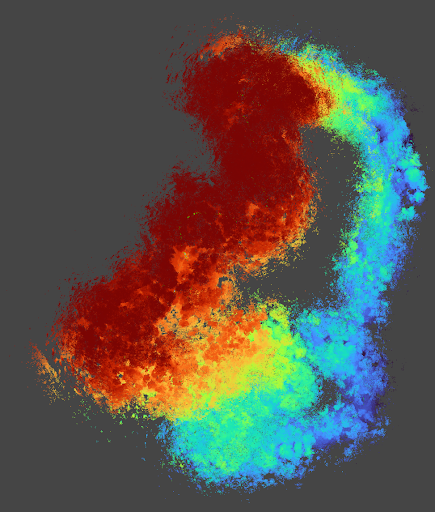
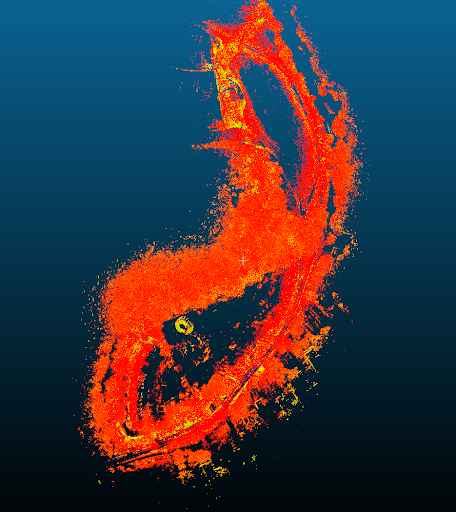
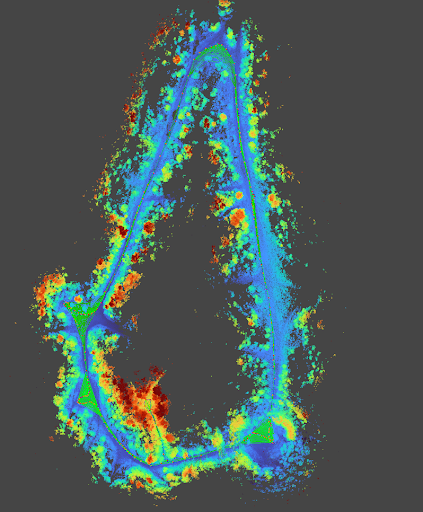
3. Grounding + Geolocalization
Lift detections into 3D using calibration + SLAM poses, aggregate confidence, then align to global coordinates via GNSS for GIS-ready heatmaps and GeoTIFF export.